The latest iteration of Super Mega Microbot “Junior” is making progress. It can walk probably well enough for Mech Warfare, now I just need to get a radio solution that doesn’t stink and redo the weapon and turret!
This uses 12 of my latest “mjbots qdd100” servos connected with 4 independent CAN-FD buses, one per leg. A raspberry pi 3b+ runs the control at 400Hz. As with the A0 that I brought last spring, it is powered by a drill battery and weighs in around 10kg.
Heh, thanks for the receiver link! I actually have some DSMX receivers with a similar serial protocol. However, as you know me, I’m going too far and have a custom bidirectional spread spectrum solution I’ll post more about in a bit.
Since the trossen forums are down again from what I expect is another MySQL table crash…
The design in this paper that I mentioned (https://arxiv.org/abs/1904.03815) is based around a complete differential to allow two orthogonal rotational axes in a very robust package (see any self-propelled vehicle). The paper’s design uses two belt-driven motors in a layout that looks like two soda cans stuck side to side: motors and upstream hardmount in one tube/can; differential and downstream horn/mount in the other tube/can. The motors in the upstream tube drive the ‘wheel’ gears of the differential via belts which provides easy servicing and some compliance, but leaves a lot of moving parts exposed and produces a non-very-compact joint when connecting multiple joints in series.
My thought was basically compacting it by mounting two servos to the legs of a U-bracket to directly drive the two ‘wheel’ gears of the differential instead.
Could add flex shaft couplings between servos and ‘wheel’ gears of the differential to help protect the servos from sudden impacts that the belt provides in the paper’s design.
Realized just a few minutes ago that this would work just as well with my supply of AX-12A, so may try it out myself. Had been looking at spiral bevel gears for right-angle gearing in another project, and the cheapest solution is the mass produced bevel gears for R/C differentials which should not be excessively large for and AX-12 bot. Still don’t have a 3D printer on hand and lockdown means I cannot get into the shop at work, so limits my options a bit.
The idea here is to get 2DOF out of a single joint? You’ll get rotation around the axis of the “wheels/motors,” and you additionally get rotation around the axis of the output bevel gear?
Feels like a conventional 3DOF leg would want the motors/differential on the femur, rather on the body, in that case – else the front/back rotation will not be in the right plane.
I’m starting to work on an upgraded turret and weapon. Last fall @GhengisDhon sent me a step file with his feeder, so I wanted to give it a try. I didn’t bother with a bearing, already had a matching Pololu motor, and just hot glued a cut up piece I wasn’t going to use for now to recirculate. First print seems to be working fine! 30 minutes so far of continuous operation with no jams. You definitely got it figured out.
On another note, I’m trying to figure out I want my hop up to look. I’ve previously just used @jwatte’s simple one that I had Shapeways print. To connect it up with another feeder I need to modify it some, and I’d had some problems keeping the barrel positioned correctly before so I took it apart and tried to figure out how to fix things up. As I took it apart, it seems that there is no actual positive mechanism keeping the barrel from sliding out aside from friction with the rubber sleeve. See video:
Am I missing something?
Finally, the barrel style I have doesn’t seem to exist as a standalone thing. Is it just termed a “Defender style barrel”? The design that @GhengisDhon sent looks to use what I think is a more traditional airsoft inner barrel that has a bucking and uses a barrel clamp to hold it in place. What is that type of barrel called? Is the barrel clamp something that people 3D print, machine, or is it an off the shelf part? I was considering switching to that style just so the parts would be more easily accessible, although now that no airsoft store is shipping, I may end up sticking with my defender barrels.
I use an Angel Tight Bore Barrel. The length doesn’t seem to matter for the distance we are at. I pair it with a Matrix Hop -up Bucking. It comes in a few different styles and once again I haven’t noticed any differences between them.
Both of these will fit the 3D printed breach I assume I sent you as well. If not, let me know and I can send it ot you.
I use laser cut delron for that piece. You can also use a 3D printed piece, but it needs to be thickened and maybe made into 2 separate pieces as its not as flexible as delron when slipping over the slots in the barrel.
The Defender style barrel connection is, AFAICT, only specific to that model.
For my new gun design, I use regular Airsoft barrels, which have two small notches on the side of the barrel, a thin slot to align the bucking, and the square hole for the hop-up.
I don’t use a clip; instead I have a cut feature in my retainer to hold it, and a M3 screw comes through underneath, pushing the bucking up approximately the right amount.
If you want to buy those parts, I’d recommend getting extra bucking, because it will eventually wear out, and it may also pinch and rip while you’re experimenting with it (a more immediate problem!)
Cool, thanks. I’d love to switch to regular airsoft components. Know of someplace that is still shipping during the plague? Amazon doesn’t seem to stock anything.
Would the scumbags be multiple accounts connected to a single warehouse and/or shipping broker listing stuff in US locations but slow direct shipping from China?
Or just warehouses, generally, that are still open.
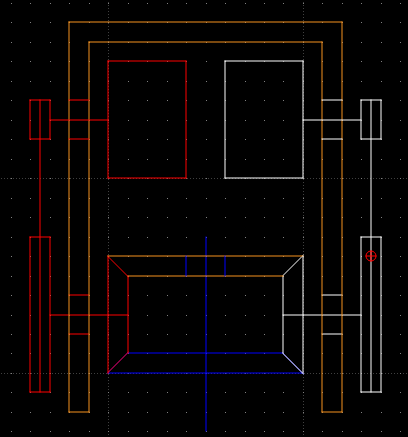
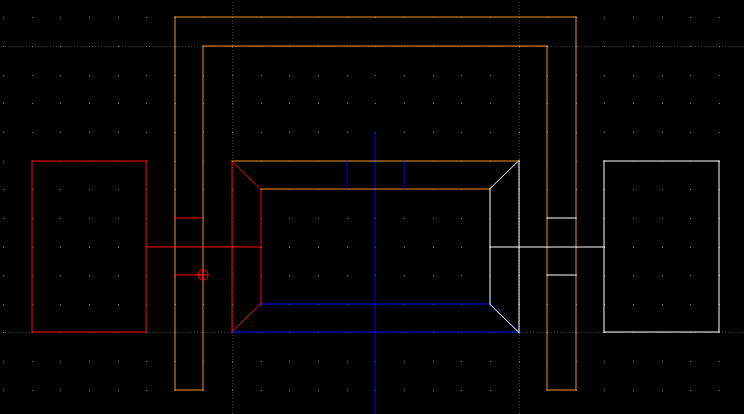
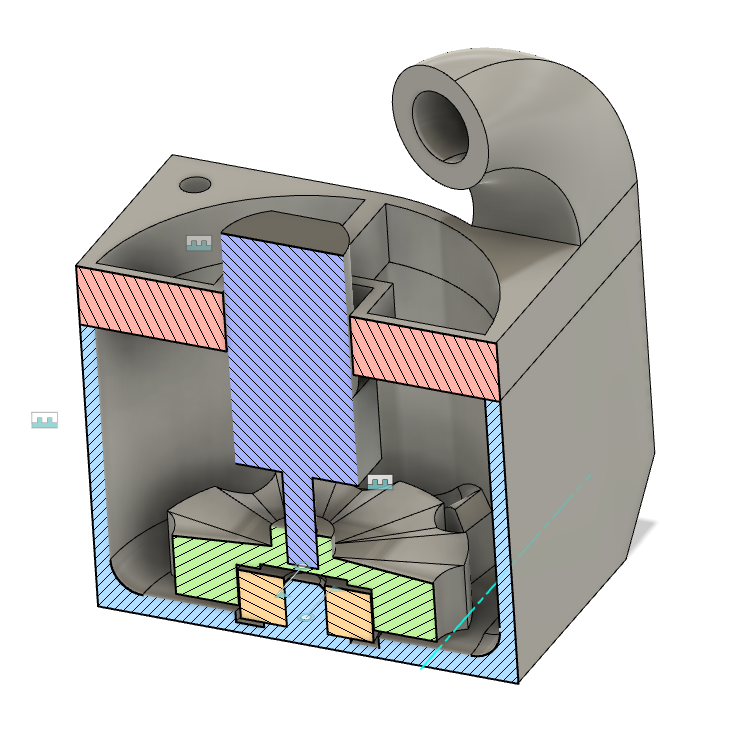
I re-modeled Ghengis Dhon’s lower loader so that I could have it parametric in F360. I wanted to update how it was integrated and use a bearing that I have a lot of around.
Seems to push BBs as well as the original (although I didn’t tune my test recirculator, so that leaks enough BBs that it can only run for an hour or so before going empty).
A little tape and cardboard would push the BBs back, I think?
What’s the size you have lots of? 4x12x4? I imagine you’re using these in your actuator design?
I would sure hope so! When you’re actually walking, you’ll get more shake to help the BBs settle, btw.
One thing to watch out for is when there’s more BBs – it doesn’t look quite full in the picture, and “a heap of BBs” actually has more failure cases than “a sprinkling of BBs.”
Thanks for uploading the model (online 3D viewers are getting pretty cool these days), I had a good look at it while working on my own loader system.
I am curious as to whether you actually need the bearing. Surely you could mount the motor lower such that there was less bending load on the shaft? (not that having a bearing hurts, I’m just curious if I’m underestimating the amount of force going on inside the loader)
I’ll echo what @jwatte said: In some simulations I did today, the force on the motor goes up as the number of BB’s increases - both as a constant load and as a “jam potential.”