The final all-in weight is 1.46kg! Not a problem for me, but I guess that could be more than some other entire mechs.
So, next up is doing some endurance testing at range, and making sure it doesn’t get horribly busted up when shot at. The clear plate in front is just 1mm PETG from ponoko. I was planning on milling out some polycarbonate but my mill has been down for a while now. We’ll see how it holds up.
I got out to do the first range testing this morning. I re-learned how difficult it is to see the laser pointer at even 12ft range through the FPV view. For all this testing, I aimed just by looking with my eyes, I’ll need to make an on-screen reticule before I have any chance of aiming with the FPV view.
Here’s my “test setup”… firing into a cluttered garage at a range of about 12ft.
A quick video (including showing my “soft zoom” feature):
And a slightly longer video from my stationary video camera:
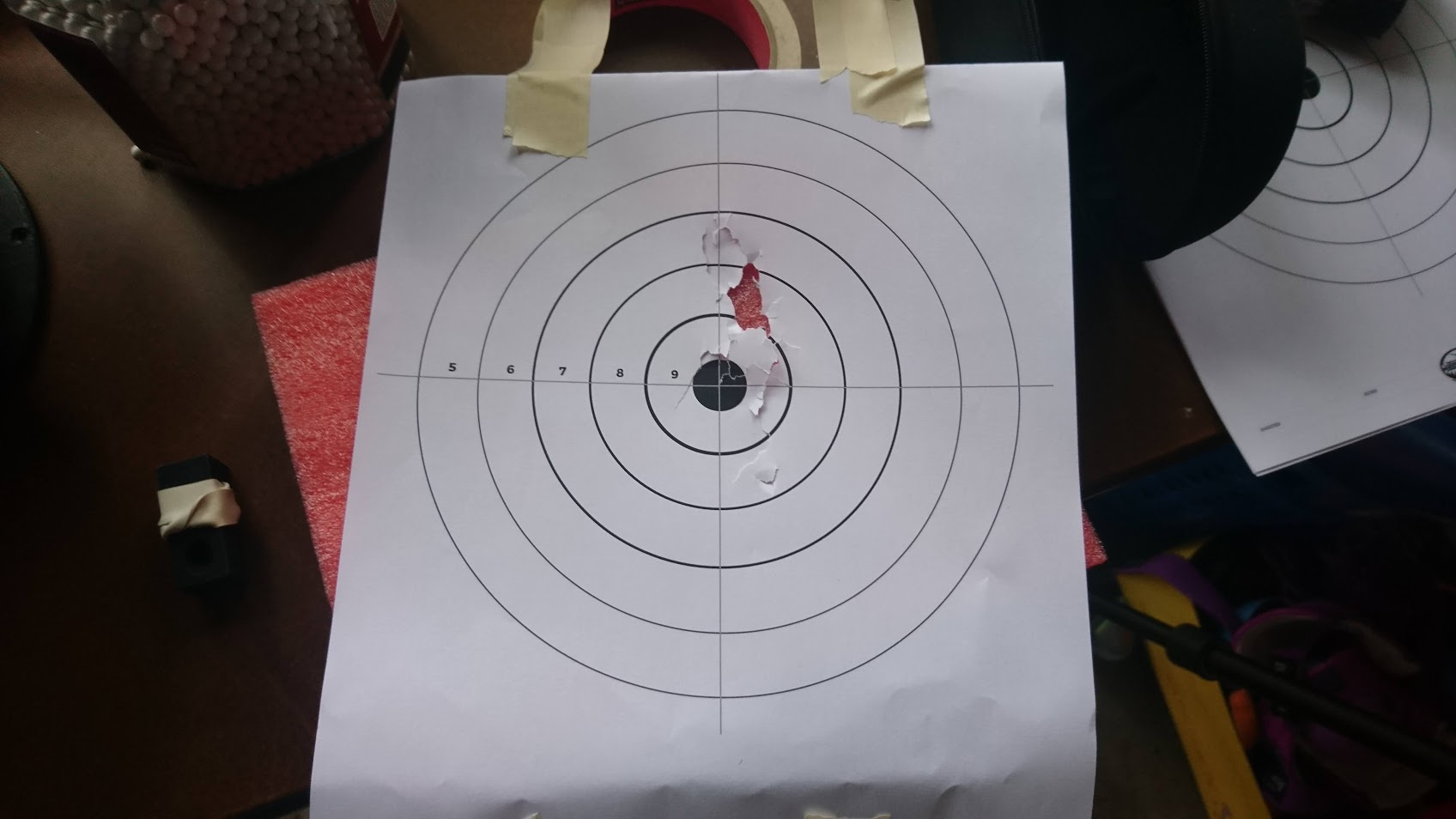
This turret is way more stable when shooting than my old one. I had no tracking here at all, and it moved typically maybe an inch max at full 12ft range after each shot. I went through two full loads, around 800 shots total with no problems.
Next up I’ll get the reticule going so I can verify it works as well just using FPV.
And now with a reticle, I think I’ll call the basic operation and functionality all complete.
I did another round of testing today. After a dozen calibration shots, I proceeded to shoot about a thousand rounds just using the FPV. About half of those I did with the control station 40 feet across the street. The FPV camera was way more niggly than I expected even at that relatively short range, but I guess it is operating near a bunch of other things in a small box in an urban-ish environment with a lot of 5GHz so maybe that’s to be expected? In any case, with minor amounts of positioning of the receiver antenna, it was totally usable at 40 feet.
I tweaked my soft zoom to 5x, and lowered the control rates to 10x lower than when un-zoomed. I can spin the turret 360 degrees in about 1.5s at full rate which is probably not necessary in an event. 1/10th seems reasonable for rapid positioning at medium to long range though.
When I stuffed as many BBs as I could into the magazine, I got around 550 shots.
I also used a defender I hadn’t torn down to probe it for weaknesses at point blank range. It seems pretty solid. I left a few minor blemishes on the front clear PETG, but that was much better than I expected. Looks like I won’t have to go for polycarbonate after all. Ponoko only charged me $3 for each front plate (and I got 5 initially), so I guess I’ll just consider them disposable if they get too hard to see through.
Is there some reason why you need to tune the loader to prevent dry fires?
I guess something (what?) happens if you keep forcing rounds into the breech?
With my long range auto lance gun design, I just have the loader motor running all the time when firing. It’s running at low enough power (about 100mW) that heat isn’t a problem, and the breech isn’t open for long enough for it to stuff in two rounds.
About half of those I did with the control station 40 feet across the street. The FPV camera was way more niggly than I expected even at that relatively short range
I’m surprised it was so short. In my tests a 25mW 5.8ghz camera system achieved closer to 100ft through an urban environment.
Is your FPV system an analog system or are you running it over 5.8g wifi? I wonder if it’s worth using circularly polarised antennas?
The final all-in weight is 1.46kg! Not a problem for me, but I guess that could be more than some other entire mechs.
Uh yeah, that is 1.7 times heavier than my entire mech!
Is there some reason why you need to tune the loader to prevent dry fires?
I guess something (what?) happens if you keep forcing rounds into the breech?
Probably no good reason, I just haven’t spent any time to validate it pushing more than necessary yet.
I’m surprised it was so short. In my tests a 25mW 5.8ghz camera system achieved closer to 100ft through an urban environment.
Is your FPV system an analog system or are you running it over 5.8g wifi? I wonder if it’s worth using circularly polarised antennas?
Finally getting around to working on walking gaits. My first try at balancing made some marked improvements! I haven’t really tried optimizing this at all yet, but here’s 0.5m/s walking on flat ground.